第一章 前言
气溶胶(Aerosol)是由固体或液体小质点分散并悬浮在气体介质中形成的胶体分散体系,又称气体分散体系。其分散相为固体或液体小质点,其大小为0.001~100微米,分散介质为气体。
气溶胶激光雷达发射激光束到大气中,与大气中的分子,颗粒物(云、烟尘、海盐等)形成散射,后向散射信号被激光雷达光学系统接收,光电探测器将光信号转化为电信号,通过计算机在空气中的传播时间,得到不同距离(高度)上的回波信号,从而得到沿光束发射方向的气溶胶粒子分布情况。
|
CFMP-LIDAR-I教学型微脉冲激光雷达培训系统
第二章 工作原理
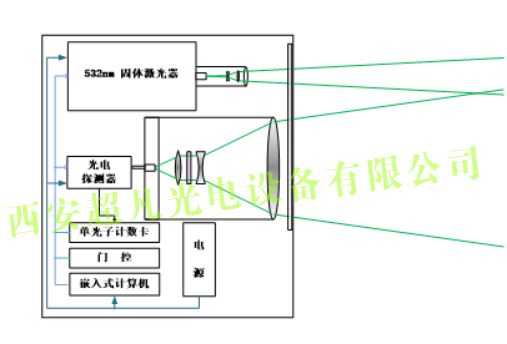
激光雷达探测最基本的过程,激光由发射机发出,经过大气的衰减,被大气中的粒子散射(一般接收到的是气溶胶粒子和分子的后向散射,所谓后向散射即沿原光路方向返回的散射),后向散射的激光在返回的路程中再次被大气消光,然后由接收机接收,然后计算回波信号进行数据处理。激光雷达系统基本上是由发射系统、接收系统、数据采集和控制系统三部分组成。
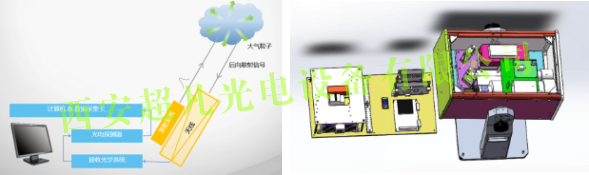 |
图1 激光雷达工作原理图 图2 激光雷达内部示意图
第三章 技术指标
类别 | 实验型气溶胶激光雷达 |
型号 | CFMP-LIDAR-I |
激光源 | 532nm |
单脉冲能量 | 20μJ |
频率 | 5-10kHz可调 |
通道数 | 1通道:弹性通道 |
线偏度 | >100:1 |
扫描范围 | 定点探测 |
探测范围 | 0.15-10km(根据天气情况) |
空间分辨率 | 13.5m/15m |
重量 | <30kg |
尺寸 | 400 mm×400 mm×700mm |
第四章 产品特点
l 功耗低,精度高,体积小巧
l 穿孔式结构,探测盲区小
l 探测大气气溶胶、云的垂直分布和时空演变特征
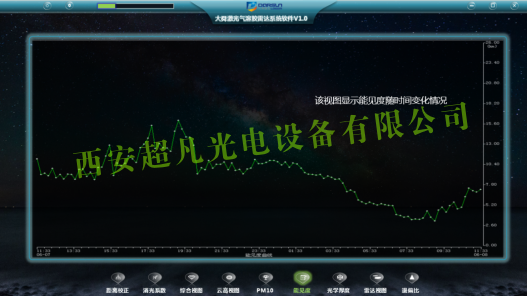
l 探测云层数、云底高、光学厚度AOD、垂直能见度
l 探测颗粒物浓度(如PM10或PM2.5)的时空演变特征
l 系统简单、无人值守、全自动不间断监测大气边界层气溶胶,实时记录和传输数据
l 根据教学需要的定制型产品,采用可开启式透明框架,元器件采用可插拔式结构,便于学生了解激光雷达核心组成及工作原理。
第五章 产品结构
实验型气溶胶激光雷达,体积小,重量轻,透明可开启外罩,便于教学,可指导学生进行实验操作,观察雷达工作过程。具备无人值守工作能力,整个工作过程全部由计算机程序控制。系统各个工作单元均由RS232标准接口通讯并获得当前工作状态,出现故障具备提示和报警功能,甚至关闭各个单元的电源。
序 号 | 设 备 | 型 号 及 参 数 |
1 | 固体激光器 | 波长532nm,单脉冲20μJ,5-10kHz可调 |
2 | 光电探测器 | PMT单光子型 |
3 | 单光子计数卡 | |
4 | 门控 | 8通道 |
5 | 嵌入式计算机 | |
6 | 望远镜系统 | |
7 | 扩束镜 | 10倍扩束,532nm |
8 | 滤光片 | 532nm,带宽1nm |
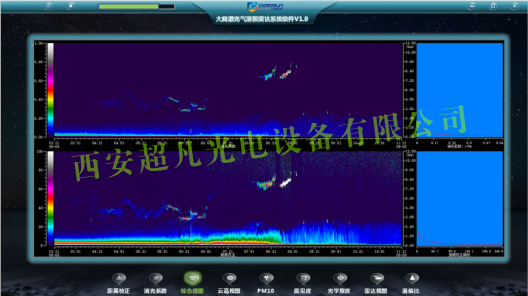
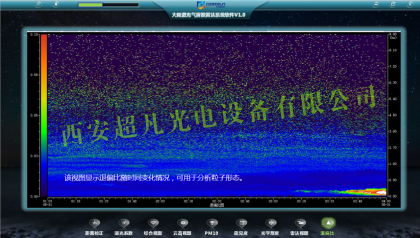
第六章 产品软件系统
气溶胶激光雷达软件功能分为两部分。1.对系统中各个子设备的控制,主要包括对激光器、采集卡、探测器、门控卡及扫描仪等装置的控制。2.实现气溶胶激光雷达系统的数据采集和消光反演及数据显示、保存、传输等功能。