
Dimensions
XC2  Enlarge Image
Enlarge ImageXC2 with I/O 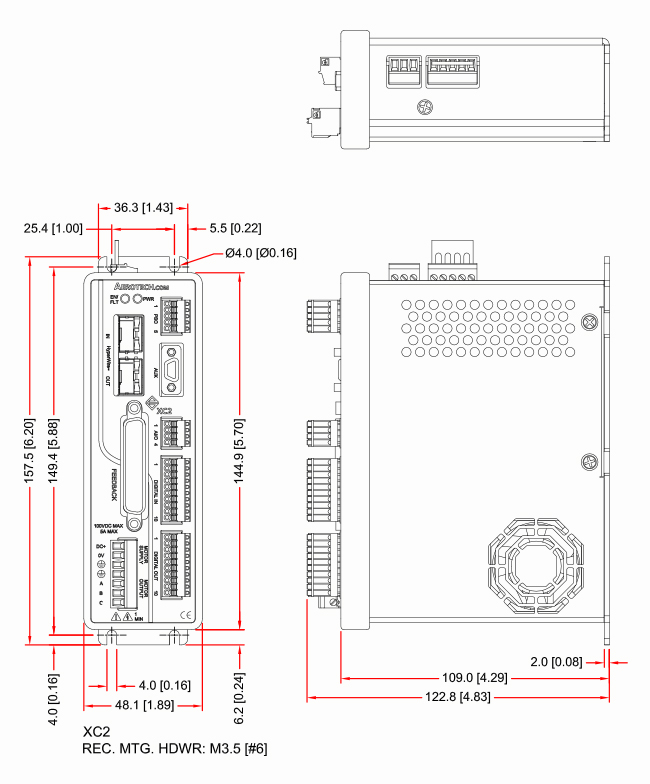 Enlarge Image
Enlarge Image
HyperWire® fiber-optic interface
10 A peak output current
Drive brush, brushless, voice coil, or stepper motors
Safe torque off (STO) safety circuit
Drive array consisting of 4 million 32-bit elements
Includes single-axis Position Synchronized Output (PSO)
Optional I/O expansion board
Optional 16K encoder multiplier for amplified sine wave encoders up to 450 kHz
High resolution digital current, velocity, and position loops
NRTL safety certification and CE approval; follows the 2011/65/EU RoHS 2 Directive
| Feature | Units | 10 |
|---|---|---|
| Motor Style | Brush, brushless, voice coil, stepper(1) | |
| Motor Supply/Bus Voltage(2) | 15-100 VDC | |
| Control Supply(2) | 24 VDC | |
| Peak Output Current (1sec)(4) | Apk | 10 |
| Continuous Output Current(4) | Apk | 5 |
| Digital Inputs | 0 (Available with -EB1 I/O Expansion Board, see below) | |
| Digital Outputs | 0 (Available with -EB1 I/O Expansion Board, see below) | |
| Analog Inputs | 0 (Available with -EB1 I/O Expansion Board, see below) | |
| Analog Outputs | 0 (Available with -EB1 I/O Expansion Board, see below) | |
| Position Synchronized Output (PSO) | One-axis PSO and one-axis Part-Speed PSO (Available with -EB1 I/O Expansion Board, see below) | |
| 25-Pin Motor Feedback Connector | High-speed Differential Inputs (encoder sin, cos and marker)* CW and CCW Limits Hall Effect Sensor Inputs (A, B, and C) Analog Motor Temperature Input | |
| Multiplier Options | MX0; no encoder multiplier includes:
| |
| I/O Expansion Board (-EB1) | 1x PSO connection point 8x digital inputs, optically isolated 8x digital outputs, optically isolated 1x analog inputs, 16-bit, differential, ±10 V 1x analog outputs, 16-bit, single-ended, ±10 V | |
| Drive Array Memory | 4,194,304 32-bit elements | |
| High-Speed Data Capture | Yes (50 ns latency) | |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 | |
| HyperWire Connections | 2x HyperWire small form-factor pluggable (SFP) Ports | |
| Automatic Brake Control | Standard; 24 V at 1 A | |
| Absolute Encoder | Renishaw Resolute BiSS; EnDat 2.1; and EnDat 2.2 | |
| Current Loop Update Rate | kHz | 20 |
| Servo Loop Update Rate | kHz | 8 |
| Power Amplifier Bandwidth | kHz | 2500 Hz maximum (software selectable) |
| Power Amplifier Efficiency | kHz | 85-95%(5) |
| Minimum Load Inductance | mH | 0.1 |
| Operating Temperature | °C | 0 to 40°C |
| Weight | kg (lb.) | 0.54 (1.20) |
| Compliance | CE approved, NRTL safety certification, 2011/65/EU RoHS 2 directive |
For stepper motors only, one-half of bus voltage is applied across the motor (e.g., 80 VDC supply results in 40 VDC across stepper motor).
“Keep Alive” supply.
Output voltage dependent upon input voltage.
Peak value of the sine wave; rms current for AC motors is 0.707 * Apk.
(2) Dependent on total output power: efficiency increases with increasing output power.
Enlarge ImageEnlarge Image| Option | Description |
|---|---|
| XC2 | XC2 PWM digital drive |
| Option | Description |
|---|---|
| -10 | 10 A Peak, 5 A cont. current (default) |
| Option | Description |
|---|---|
| -EB0 | No expansion board (default) |
| -EB1 | IO expansion board |
| Option | Description |
|---|---|
| -MX0 | No encoder multiplier (default) |
| -MX1 | 450 kHz x16384 multiplier (primary), no multiplier (auxiliary) |
| Option | Description |
|---|---|
| -PS01 | One-Axis PSO (default; includes One-Axis Part-Speed PSO) |
Note: PSO functionality is included in the base XC2. The -EB1 board is required to use PSO logic to generate an output signal.